Value-focused embeddable tactical grade inertial navigation system with external position and velocity inputs. Features an advanced Extended Kalman Filter, cutting-edge orientation algorithms, advanced time management, and event triggering system.
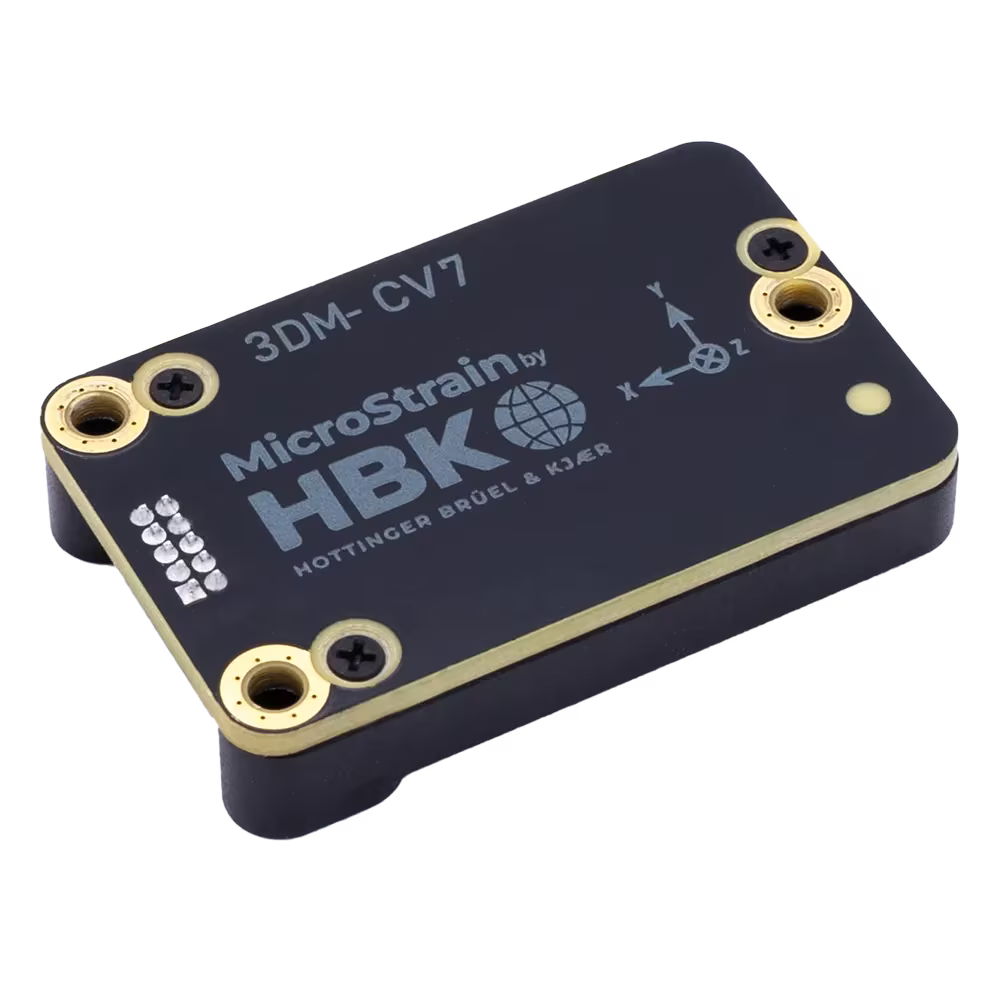
The 3DM-CV7 offers tactical grade inertial performance in the smallest and lightest OEM package yet. Each 3DM-CV7 is individually calibrated and features an Adaptive Extended Kalman Filter for optimal performance over a wide range of operating conditions.
All models in the 3DM-CV7 series feature cutting-edge orientation algorithms, advanced internal time management, and a flexible event triggering system. The INS model adds external position, velocity, and heading inputs as well as NMEA compatibility. With an unparalleled array of advanced features, the 3DM-CV7 sets the benchmark for value and performance in its category
3DM-CV7-INS
| Specification |
Value |
| Performance Grade |
Tactical Grade |
| Random Walk |
Accel: 29.5 µg/√Hz, Gyro: 0.14 °/√hr |
| Bias Instability (Gyroscope) |
1.5 °/hr |
| Bias Instability (Accelerometer) |
18 µg |
| Hysteresis |
Accel bias: 0.75 mg, Accel gain: 600 PPM, Gyro bias: 0.03 °/s, Gyro gain: 1000 PPM |
| Communication Port Type |
Samtec FTS-105 (2×5) |
| Communication Interface |
TTL serial, USB |
| Update Rate |
IMU: 1000 Hz, EKF: 1000 Hz |
| Inputs/Outputs |
4×GPIO |
| Weight |
8.3 g |
| Size |
38 mm × 24 mm × 8.6 mm |
| Power Consumption |
0.23 W |
| Input Voltage |
3.2 V to 5.2 V |
| Minimum Operating Temperature |
−40 °C |
| Maximum Operating Temperature |
85 °C |
| MTBF |
2 002 026 h |
| GNSS Input(s) |
External Input(s) |
| Sensing Range (Accelerometer) |
4 g |
| Sensing Range (Gyroscope) |
250 °/s |
| Sensing Range (Magnetometer) |
8 Gauss |
| Sensing Range (Pressure) |
1260 mbar |
| Accuracy |
Roll/Pitch (dynamic): 0.5°, Roll/Pitch (static): 0.25°, Heading (static): 0.5°, Heading (dynamic): 2° |
| Ingress Protection Rating |
Not Rated |
| Housing Material |
Aluminum |
| Software |
MSCL, ROS, SensorConnect |
| Mounting Style |
Embeddable, Screw Down, Precision Alignment |